歩行や運動の工学的解析に基づいた医療福祉機器の開発
歩行に関連した工学的解析、リハビリテーション機器・福祉機器への応用や開発等について取り組んでいます。
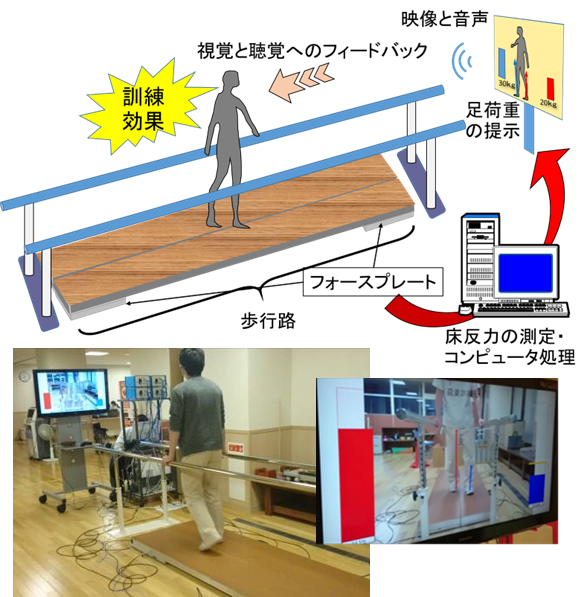
図Aは「床反力の視聴覚フィードバック機構を有する歩行訓練システム」です。歩行のリハビリテーションにおいて、患側の足荷重の把握が重要です。図で示すようなディスプレイにてリアルタイムで荷重が把握できるシステムを考案し開発しています。足荷重に応じて画面上のゲージ等を動かすことで、足荷重値や足接地タイミングをフィードバックして、適切な足荷重や足の上下動、歩行姿勢などに自然に導くことが期待できます。
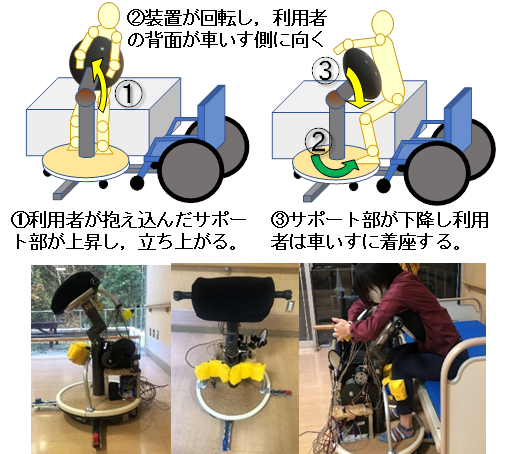
図Bは「移動操作可能な移乗支援装置」です。写真に示すような使用者が抱え込むように乗り込んでベッドから車いすに移乗できる装置を開発しています。この装置は、タブレット操作で使用者のところまで移動できるようになっています。今後は、利用者の力を計測(力センシング)して、その変化により機器の動作を制御することで、スイッチ等を必要とせず、一人で移乗動作が行えるような改良を検討中です。
その他にも複数の研究テーマに取り組んでいます。詳細は池内研究室をご覧ください。
図A
床反力の視聴覚フィードバック機構を有する歩行訓練システム
図B
自立移動可能な移乗支援装置